Autore:┬ĀDott. Renato Turrini.
Paziente donna di anni 43. Portatrice di protesi parziale superiore rimovibile, debole fumatrice, non presenta malattie sistemiche rilevanti. Riferisce una fobia odontoiatrica e persistenti dolori articolari, una volont├Ā di ripristinare una condizione buccale ottimale sia in termini estetici che funzionali.
La paziente ├© a conoscenza delle nuove tecnologie odontoiatriche che permettono interventi mininvasivi e soprattutto, un post-operatorio quasi assente.
Viene quindi proposta una chirurgia software guidata non solo per soddisfare le richieste della paziente ma anche per uno studio accurato e dettagliato del caso che ci consenta di operare in sicurezza, in massima precisione e con rapidit├Ā.
Per questo viene eseguito un esame diagnostico 3D grazie al quale abbiamo la certezza di eseguire un intervento in chirurgia guidata tramite un progetto implantoprotesico precostruito. Riusciamo cos├¼ ad eseguire in una sola seduta in tecnica flapless (senza apertura del lembo), quindi senza sanguinamento e con piccole dosi di anestesia, lŌĆÖintervento chirurgico implantare e subito dopo realizziamo la fase protesica licenziando la paziente con una protesi fissa.
Il grande vantaggio rispetto alla chirurgia tradizionale ├© il minor stress operatorio cui ├© sottoposto sia il paziente che il chirurgo, una grande affidabilit├Ā diagnostica, la realizzazione immediata di una protesi e soprattutto un postoperatorio (edema, gonfiore e dolore) quasi inesistente.
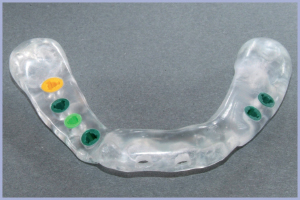
La paziente ha unŌĆÖedentulia dei seguenti elementi dentali: 14, 15, 23, 24, 25 e 26. ├ł stata eseguita, previa impronta in alginato di elevata precisione, una mascherina radiologica dallŌĆÖodontotecnico che ingloba un marker radiologico e reperi radiopachi per una chirurgia protesicamente guidata, come da procedura DSL (Digital Service Leone). Dopo aver verificato la stabilit├Ā e la precisione del bite radiologico sulla paziente, eseguo in studio un esame cone beam con apparecchiatura Planmeca ProMax 3D facendo particolare attenzione che tutto il marker 3D sia presente allŌĆÖinterno delle immagini.
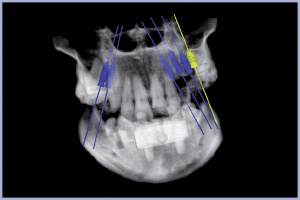
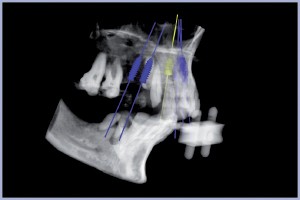
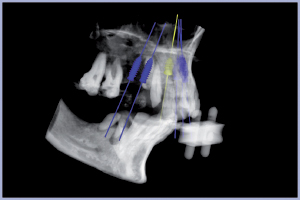
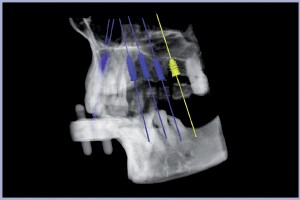
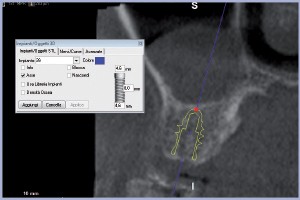
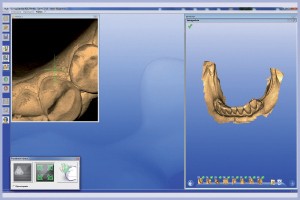
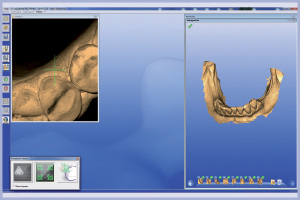
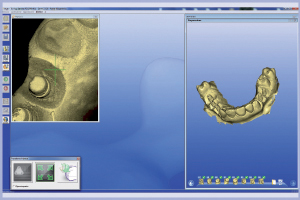
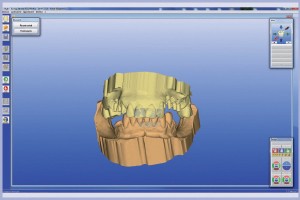
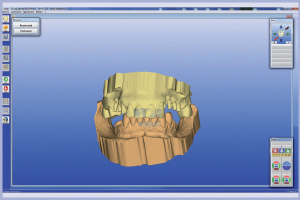
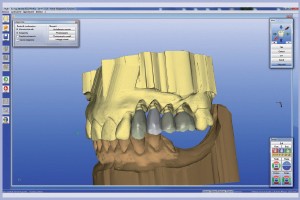
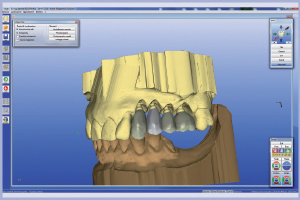
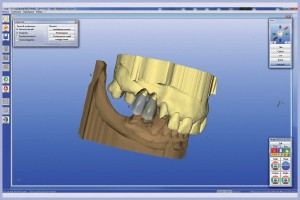
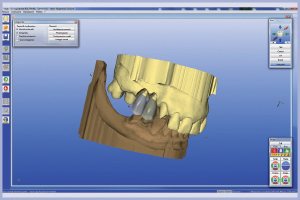
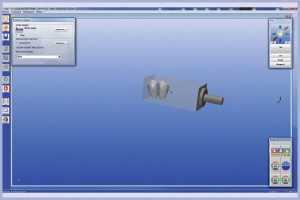
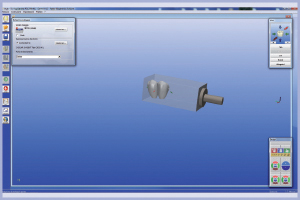
Dopo aver eseguito lŌĆÖesame, i file dicom vengono acquisiti dal software di programmazione 3Diagnosys LEONE. Studio in modo accurato lŌĆÖanatomia del mascellare superiore verificando la possibilit├Ā di inserimento di impianti nei siti edentuli. Nel quadrante superiore destro progetto in zona 14 e 15 due impianti Exacone┬« Max Stability 3,75 x 12 mm e nel quadrante superiore sinistro nelle zone 23, 24, 25 e 26 rispettivamente un impianto Exacone┬« Max Stability 3,75 x 12 mm, un impianto Exacone┬« 3,3 x 12 mm, un impianto Exacone┬« Max Stability 3,75 x 10 mm e un impianto Exacone┬« Max Stability 4,5 x 8 mm (Figg. 1-10).
-
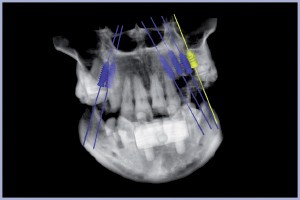
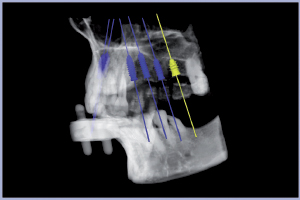
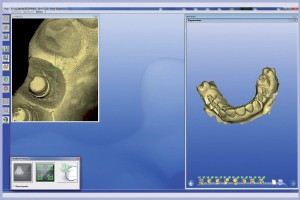
- Figg. 1-3 – Pianificazione implantare nella ŌĆ£ricostruzione 3DŌĆØ del software 3Diagnosys Leone
-
- Fig. 2
-
- Fig. 3
-
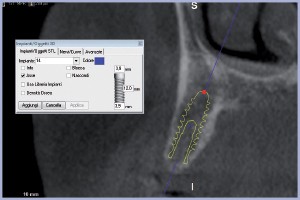
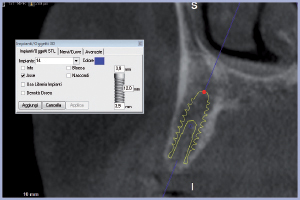
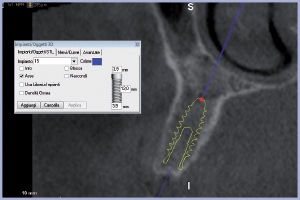
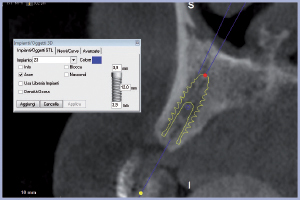
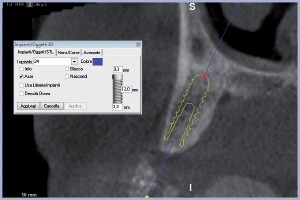
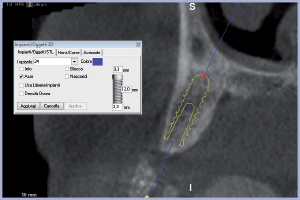
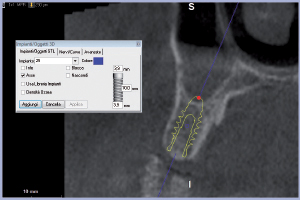
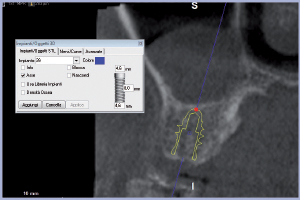
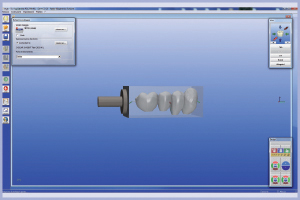
- Figg. 4-9 – Impianti pianificati visti nelle ŌĆ£cross sectionŌĆØ su software 3Diagnosys Leone
-
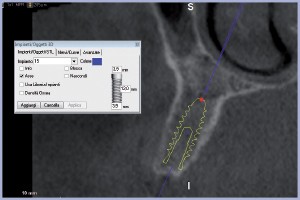
- Fig. 5 – Impianto posizione 15
-
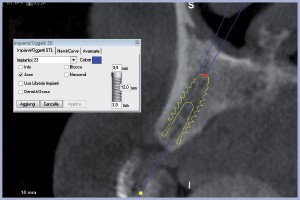
- Fig. 6 – Impianto posizione 23
-
- Fig. 7 – Impianto posizione 24
-
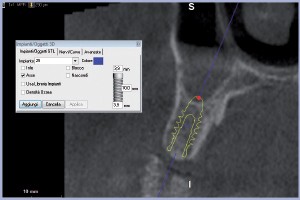
- Fig. 8 – Impianto posizione 25
-
- Fig. 9 – Impianto posizione 26
-
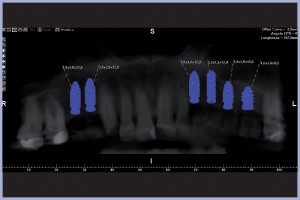
- Fig. 10 – Impianti pianificati visti nella ŌĆ£panorexŌĆØ su software 3Diagnosys Leone
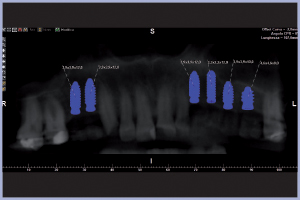
Gli impianti vengono inclinati a causa del fisiologico riassorbimento osseo avvenuto negli anni dovuto alle estrazioni e viene poi corretta la posizione protesica con abutment inclinati.
La paziente firma il consenso informato dopo essere stata dettagliatamente ragguagliata circa il trattamento implantoprotesico progettato e il conseguente intervento chirurgico.
Viene inviato il progetto al Digital Service Leone tramite sito internet, e conseguentemente spediti anche il modello in gesso e la mascherina radiologica. Il Digital Service realizza il Modello Master 3D (Fig. 11) sul quale poi lŌĆÖodontotecnico trasforma la mascherina radiologica in chirurgica (Figg. 12-13). Sullo stesso Master lŌĆÖodontotecnico preforma anche un provvisorio immediato utilizzando monconi temporanei in peek e avvalendosi della tecnologia CAD-CAM Sirona per la realizzazione dei ponti in resina (Figg. 14-20).
-

- Fig. 11 – Modello Master 3D realizzato da Digital Service Leone

-

- Fig. 12 – Modello Master 3D con guida chirurgica realizzata dallŌĆÖodontotecnico

-

- Fig. 13 – La guida chirurgica realizzata dallŌĆÖodontotecnico
-
- Fig. 14 – Acquisizione ottica modello in gesso arcata antagonista con scanner InEos Sirona
-
- Fig. 15 – Acquisizione ottica modello in gesso arcata superiore con scanner InEos Sirona con i monconi temporanei personalizzati sul Modello Master 3D
-
- Figg. 16-20 – Modellazione dei ponti provvisori in resina con software Inlab Sirona
-
- Fig. 17
-
- Fig. 18
-

- Fig. 19
-
- Fig. 20
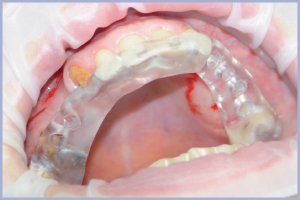
Il giorno dellŌĆÖintervento provo la guida in bocca alla paziente controllando la perfetta stabilit├Ā e lŌĆÖesatto inserimento attraverso le finestre realizzate dal tecnico (Figg. 21-23).
Rimuovo la guida e somministro unŌĆÖanestesia plessica UBISTESIN 1:100.000 in bassa dose poich├® si prevede che lŌĆÖintervento pianificato sia rapido e minimamente invasivo (Fig. 24).
-

- Figg. 21-23 – Prova della guida chirurgica in bocca

-

- Fig. 22

-

- Fig. 23

-
- Fig. 24 – La situazione subito dopo lŌĆÖanestesia
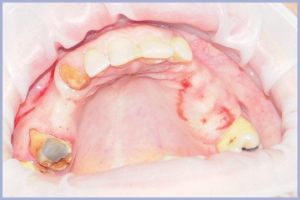
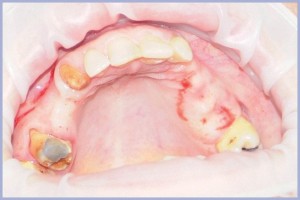
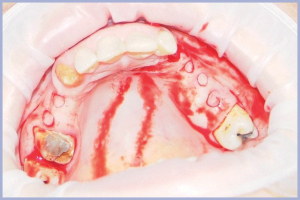
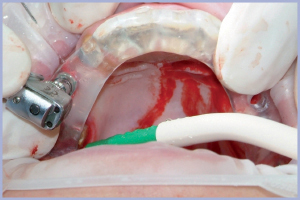
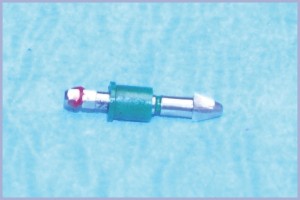
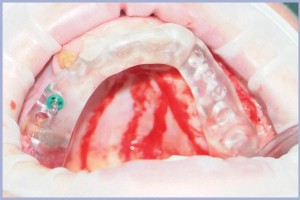
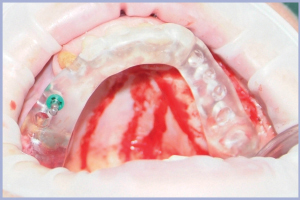
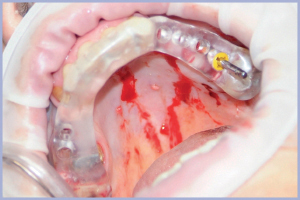
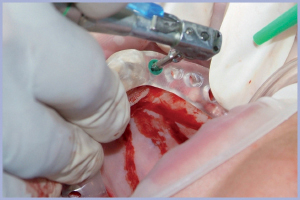
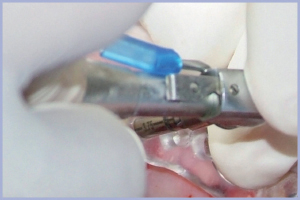
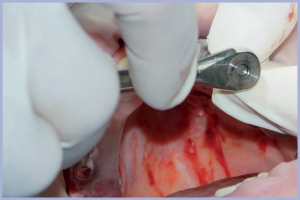
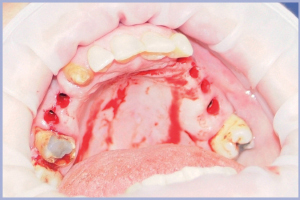
Prima di effettuare la mucotomia, rimuovo tutte le boccole con lŌĆÖapposito estrattore (Fig. 25) e successivamente, inserisco la guida in bocca (Fig. 26). Passo attraverso ciascun foro lasciato da ogni singola boccola il relativo mucotomo connesso al micromotore (Figg. 27-28); poich├® il diametro esterno di ciascun mucotomo ├© congruente al diametro esterno della corrispondente boccola, la realizzazione dellŌĆÖopercolo gengivale ├© guidata. Al termine di questa operazione rimuovo la guida e asporto i tasselli di gengiva (Figg. 29-30).
-

- Fig. 25 – Rimozione delle boccole dalla guida con lŌĆÖapposito strumento

-

- Fig. 26 – Guida senza boccole inserita in bocca per la mucotomia
-

- Figg. 27-28 – Mucotomia

-

- Fig. 28

-

- Figg. 29-30 – Asportazione tasselli di gengiva
-

- Fig. 30

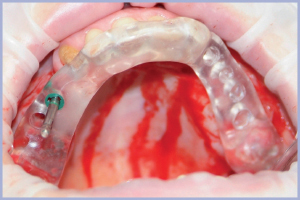
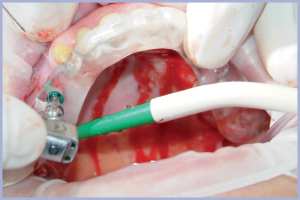
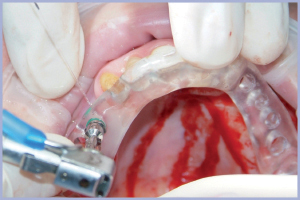
Reinserisco le boccole nella guida con lŌĆÖausilio dellŌĆÖapposito strumento e per ogni singolo sito passo le frese Zero1 che il tecnico mi ha indicato nella scheda allegata al modello Master3D compilata al momento della realizzazione della guida chirurgica. Per ciascun impianto, dapprima inserisco le frese Zero1 attraverso le boccole e poi riposiziono la guida in bocca. Connetto poi le frese al micromotore tramite il raccordo stop e freso il sito attraverso un movimento di ŌĆ£vai e vieniŌĆØ per permettere la graduale evacuazione dellŌĆÖosso. Durante il fresaggio il sito viene raffreddato dalla fisiologica del micromotore che penetra attraverso i lobi presenti nelle boccole e dal liquido iniettato direttamente allŌĆÖinterno dellŌĆÖalveolo dalla mia assistente con un ago piegato di una siringa attraverso il passaggio presente tra la guida e il tessuto molle.
Passo le frese svasatrici allo stesso modo (inserisco prima le frese nella guida fuori dal cavo orale e poi posiziono tutto in bocca), arrestando il fresaggio quando lo stop arriva a battuta sulla boccola. In alternativa per alcuni impianti inserisco prima la boccola sulla fresa, che successivamente connetto al micromotore tramite il raccordo stop e poi inserisco il tutto attraverso la guida gi├Ā posizionata in bocca; in questo modo la boccola viene portata in sede nel corrispondente foro della guida.
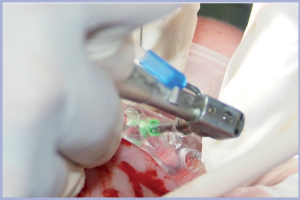
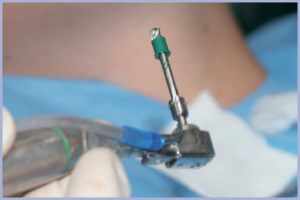
Dopo aver ultimato il fresaggio del sito, rimuovo le boccole per permettere lŌĆÖinserimento guidato degli impianti. Per fare questo, sostituisco i carrier presenti nelle confezioni degli impianti con i carrier per chirurgia guidata; avvito quindi lŌĆÖimpianto nel foro corrispondente presente sul blocchetto cambio carrier, rimuovo il carrier dallŌĆÖimpianto e ci inserisco il nuovo carrier che fa presa con lŌĆÖimpianto tramite il gommino presente sul tratto di connessione interna. Porto a dimora lŌĆÖimpianto attraverso il foro, lasciato dalla rimozione della boccola, nella guida; il diametro del carrier ├® uguale al diametro della boccola. LŌĆÖinserimento dellŌĆÖimpianto avviene tramite gli strumenti tradizionali (manipolo con raccordo o cricchetto) fino ad arrestarsi quando la tacca di riferimento arriva al margine superiore della guida (Figg. 31-50).
-

- Fig. 31 – Realizzazione guidata del sito 14. Fresa Zero1 diametro 2,8 mm

-

- Fig. 32 – Inserimento della fresa nella guida fuori dalla bocca

-

- Fig. 33 – Riposizionamento della guida con fresa Zero1 in bocca
-

- Figg. 34-35 – Innesto del raccordo/stop sulla fresa e fresaggio guidato fino a battuta dello stop sulla boccola
-

- Fig. 35
-
- Fig. 36 – Boccola inserita sulla fresa svasatrice
-
- Fig. 37 – Inserimento della boccola con la fresa dentro la guida gi├Ā posizionata in bocca
-

- Fig. 38 – Fresaggio fino a battuta dello stop
-

- Figg. 39-40 – Realizzazione guidata del sito 24

-

- Fig. 40
-

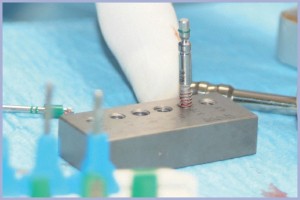
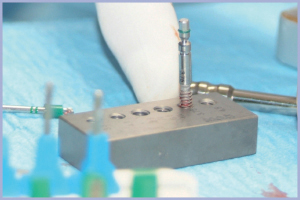
- Fig. 41-42 – Sostituzione del carrier, per lŌĆÖinserimento guidato, con il sostegno dellŌĆÖapposito blocchetto
-

- Fig. 42

-

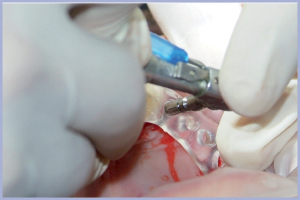
- Figg. 43-44 – Inserimento dellŌĆÖimpianto attraverso la guida con il micromotore connesso con il raccordo per manipolo

-

- Fig. 44

-

- Fig. 45 – Proseguimento dellŌĆÖinserimento guidato dellŌĆÖimpianto con il cricchetto

-

- Figg. 46-47 – Preparazione del sito 26 con fresa Zero1 diametro 3,5 mm
-

- Fig. 47

-

- Figg. 48-49 – Sostituzione del carrier con il sostegno dellŌĆÖapposito blocchetto

-

- Fig. 49

-

- Fig. 50 – Inserimento guidato dellŌĆÖimpianto Max Stability 4,5 mm in posizione 26

Nel sito 23 durante lŌĆÖinserimento dellŌĆÖimpianto si ├© rotto il carrier in corrispondenza del limitatore di torque. Provvedo quindi allŌĆÖestrazione del carrier, allŌĆÖinserimento del driver per chirurgia guidata e alla rimozione dellŌĆÖimpianto. Passo quindi la fresa dedicata per osso denso, come previsto in questi casi dalla procedura per gli impianti Max Stability, secondo modalit├Ā guidata e riinserisco lŌĆÖimpianto attraverso il foro nella guida con un nuovo carrier per chirurgia guidata (Figg. 51-61).
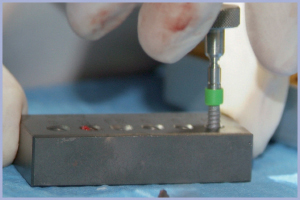
La disposizione sugli appositi organizer delle frese per chirurgia guidata in sequenza seguendo le indicazioni delle schede di accompagnamento della guida, compilate dallŌĆÖodontotecnico, facilita lo svolgimento rapido e ordinato dellŌĆÖintervento (Fig. 62).
-

- Figg. 51-52 – Preparazione del sito 23 con fresa Zero1 diametro 2,8 mm

-

- Fig. 52
-

- Figg. 53-55 – Sostituzione carrier per impianto Max Stability diametro 3,75 mm

-

- Fig. 54

-

- Fig. 55

-

- Fig. 56 – Inserimento guidato dellŌĆÖimpianto Max Stability diametro 3,75 mm in posizione 23
-

- Fig. 57 – Rimozione dellŌĆÖimpianto con driver per chirurgia guidata dopo rottura del carrier
-

- Figg. 58-59 – Passaggio fresa Zero1 per osso denso diametro 3,1 mm nel sito 23
-

- Figg. 60-61 – Reinserimento impianto Max Stability diametro 3,75 mm in posizione 23

-
- Fig. 61
-

- Fig. 62 – Strumenti e frese per chirurgia guidata sistemati secondo sequenza chirurgica per ciascun impianto
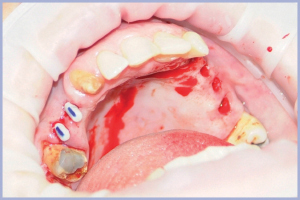
Al termine del posizionamento degli impianti (Fig. 63), provo i monconi temporanei (Fig. 64) che il tecnico ha preparato sul modello Master 3D e una volta attivati (Figg. 65-66), la protesi viene ribasata su di essi e cementata con cemento temporaneo (Figg. 67-71).
-

- Fig. 63 – Situazione finale con tutti gli impianti a dimora
-

- Fig. 64 – Prova e posizionamento monconi temporanei negli impianti
-

- Figg. 65-66 – Attivazione dei monconi temporanei

-

- Fig. 66

-

- Figg. 67-71 – Ribasatura e cementazione dei ponti provvisori in resina sui monconi temporanei

-

- Fig. 68

-

- Fig. 69
-

- Fig. 71

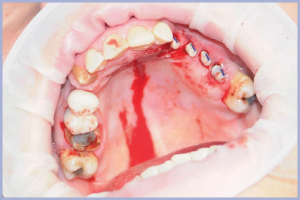
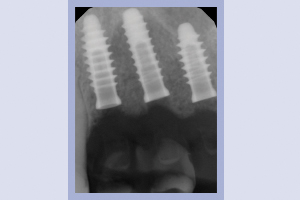
Il controllo clinico (Figg. 72-75) e radiografico 2D (Figg. 76-78) dopo 1 settimana conferma il perfetto stato di salute dei tessuti perimplantari e lŌĆÖarmoniosa integrazione della protesi provvisoria con la gengiva.
-

- Figg. 72-75 – Controllo clinico a 1 settimana

-

- Fig. 73

-

- Fig. 74

-

- Fig. 75

-

- Figg. 76-78 – Controllo radiografico a 1 settimana

-

- Fig. 77
-

- Fig. 78
